Laporan Akhir 3 (Percobaan-3)
- Arduino Uno
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya
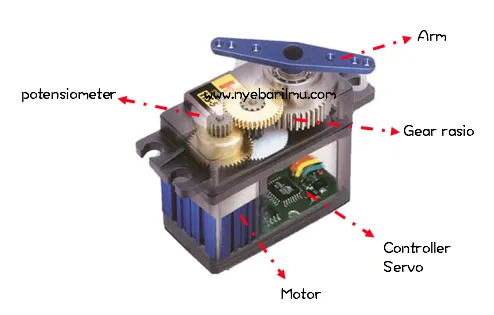
-Servo
Motor servo adalah komponen elektronika yang berupa motor yang memiliki sistem feedback guna memberikan informasi posisi putaran motor aktual yang diteruskan pada rangkaian kontrol mikrokontroler.
Pada dasarnya motor servo banyak digunakan sebagai aktuator yang membutuhkan posisi putaran motor yang presisi.
-Potensiometer
Potensiometer adalah resistor tiga terminal dengan sambungan geser yang membentuk pembagi tegangan dapat disetel. Jika hanya dua terminal yang digunakan (salah satu terminal tetap dan terminal geser), potensiometer berperan sebagai resistor variabel atau Rheostat. Potensiometer biasanya digunakan untuk mengendalikan peranti elektronik seperti pengendali suara pada penguat.
Pada rangkaian kita menggunakan VCC yang terhubung dengan potensiometer dimana salah satu kaki potensiometer terhubung dengan input analog arduino dan lainnya dengan ground. Saat nilai potensiometer diubah atau diganggu maka nilai input yang diterima arduino juga berubah. Nilai yang diterima oleh arduino pada kaki analognya akan di konversi oleh ADC sehingga menghasilkan besaran digital. Kemudian arduino akan memproses data tersebut dan mengirimkannya pada motor DC melalui kaki digital yang memiliki PWM (pulse width modulation) dimana lebar pulsa akan mempengaruhi nilainya, selanjutnya motor akan berputar sesuai dengan nilai yang diberikan oleh PWM.. Untuk mengolah data pada percobaan ini diperlukan mapping dimana untuk nilai ADC berkisar dari rentang 0 sampai dengan 1023 dan untuk nilai PWM adalah dengan rentang 0 sampai dengan 255 {output = map(nilai, 0, 1023, 0, 255);}. Saat nilai potensiometer diperbesar maka nilai pada ADC juga akan semakin besar hal ini akan menyebabkan nilai lebar pulsa yang dihasilkan juga bertambah lebar sehingga perputaran motor jadi semakin cepat. Saat nilai potensiometer diubah menjadi 100 maka nilai PWM yang dihasilkan juga 100 sehingga motor berputar lebih cepat. Dapat disimpulkan bahwa nilai yang dihasilkan potensiometer akan sebanding dengan nilai lebar pulsa dan sebanding juga dengan kecepatan putar motor DC ( nilai hasil potensiometer sebanding lebar pulsa sebanding dengan kecepatan putar motor).
1. Prinsip Kerja PWM pada rangkaian dan pengaruh potensiometer terhadap pergerakan motor.
Jawab :
Pin PWM pada percobaan dihubungkan pada motor, yang berfungsi untuk mengatur putaran motor. pada program Arduino PWM bekerja dibilangan desimal 8 bit (0-255) dan 10 bit (0-1023). Jika besar duty cycle semakin besar maka motor akan berputar semakin cepat dan jika duty cycle semakin kecil maka motor akan berputar semakin lambat.
Pada potensiometer jika nilainya 0-50% maka arah pergerakan motor sesuai arah jarum jam, sedangankan jika nilai nya 51-100% maka arah pergerakan motor berlawanan arah jarum jam.
Datasheet Arduino DISINIDownload Datasheet Servo DISINI Download Datasheet Potensiometer DISINI
.png)




Tidak ada komentar:
Posting Komentar